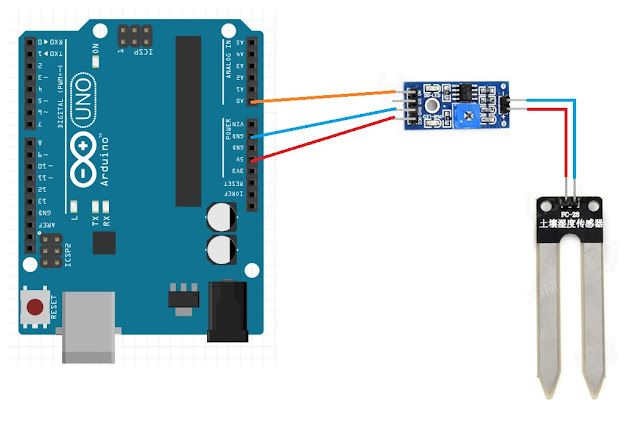
Sistema de riego (un solo led)
int Valor; int led = 13; void setup() { Serial.begin(9600); pinMode(led, OUTPUT); } void loop(){ Serial.print("Humedad:"); Valor = analogRead(0); Serial.print(Valor); if (Valor > 300) Serial.println("Seco, necesitas regar plantas"); digitalWrite(led, HIGH); if (Valor < 700) Serial.println("Humedo, No se necesita regar las plantas"); digitalWrite(led, LOW); }