Sistema de riego y simulador

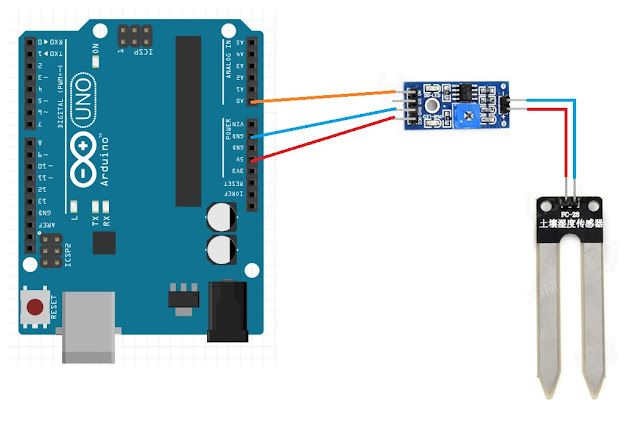
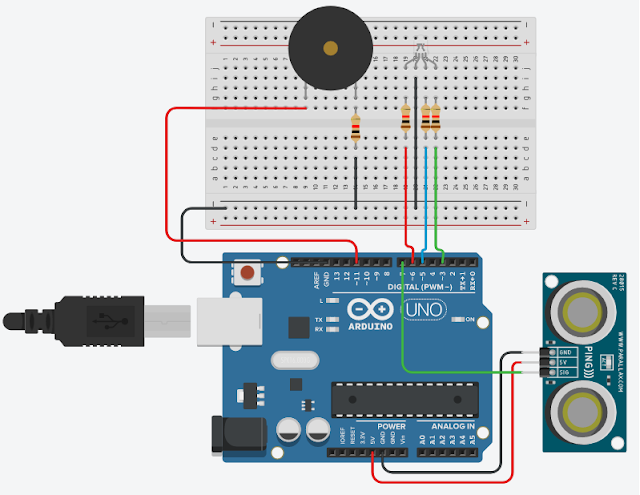
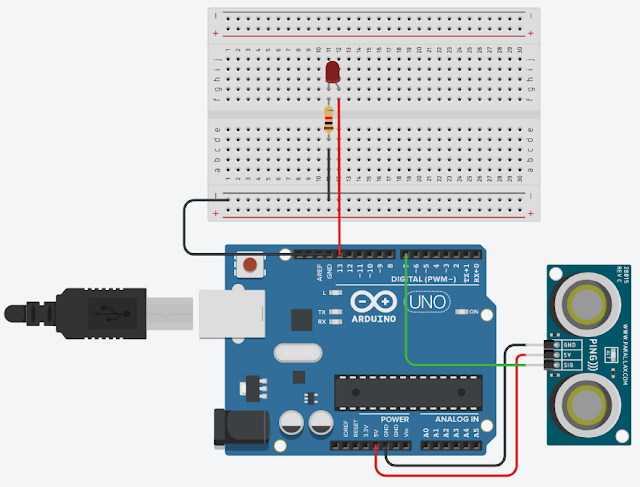
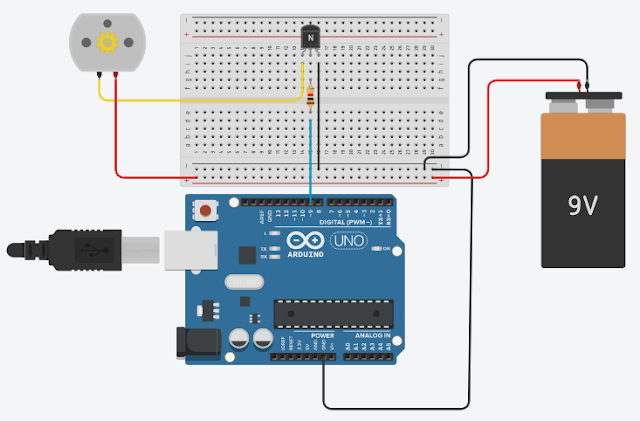
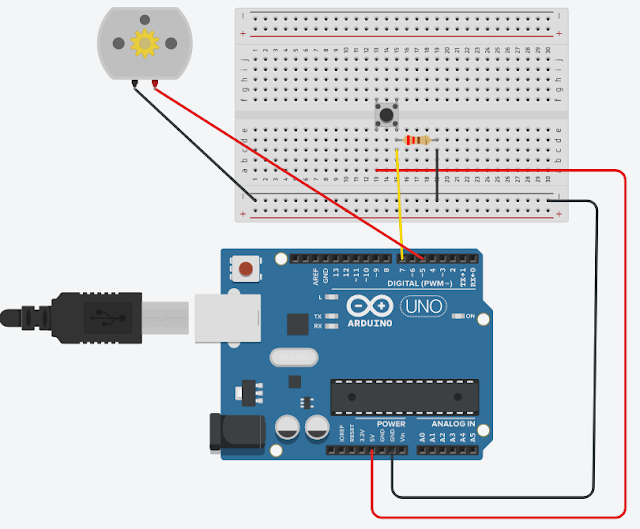
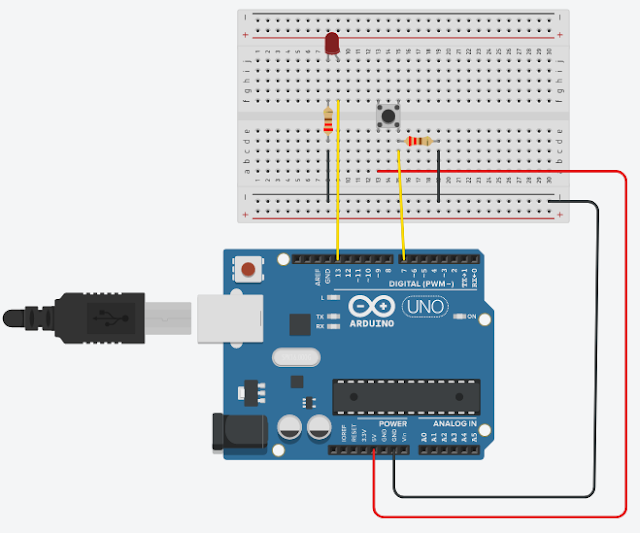
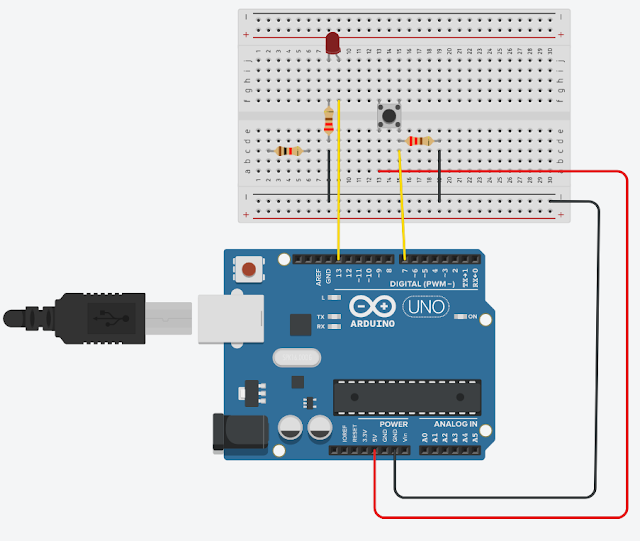
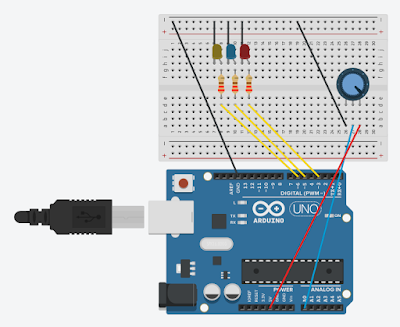
Componentes: 1 Arduino UNO R3 1 Protoboard mediana 1 sensor humedad y temperatura DHT11 1 higlómetro YL-69 1 Minibomba sumergible DC 3V 120L/H Arduino 2,5-6V 1 diodo 1N4007 1 transistor PN2222 1 resistencia de 220 Ohm 1 foto-resistencia LDR 1 resistencia de 10000 Ohm Cables macho-macho Cables macho-hembra Montaje Esquema en fritzing.